Faculty of Engineering and Material Sciences (EMS)

Aerial Robotics Lab
Explore our Aerial Robotics Lab, where we develop and test drone technologies. Our research focuses on autonomous flight, advanced control systems, and the integration of real-time embedded platforms to push the boundaries of aerial robotics.

Custom-built Drone
This is one of our custom-built drones. Equipped with the latest in sensor technology and autonomous control algorithms, this drone represents our commitment to innovation in unmanned aerial vehicles (UAVs).
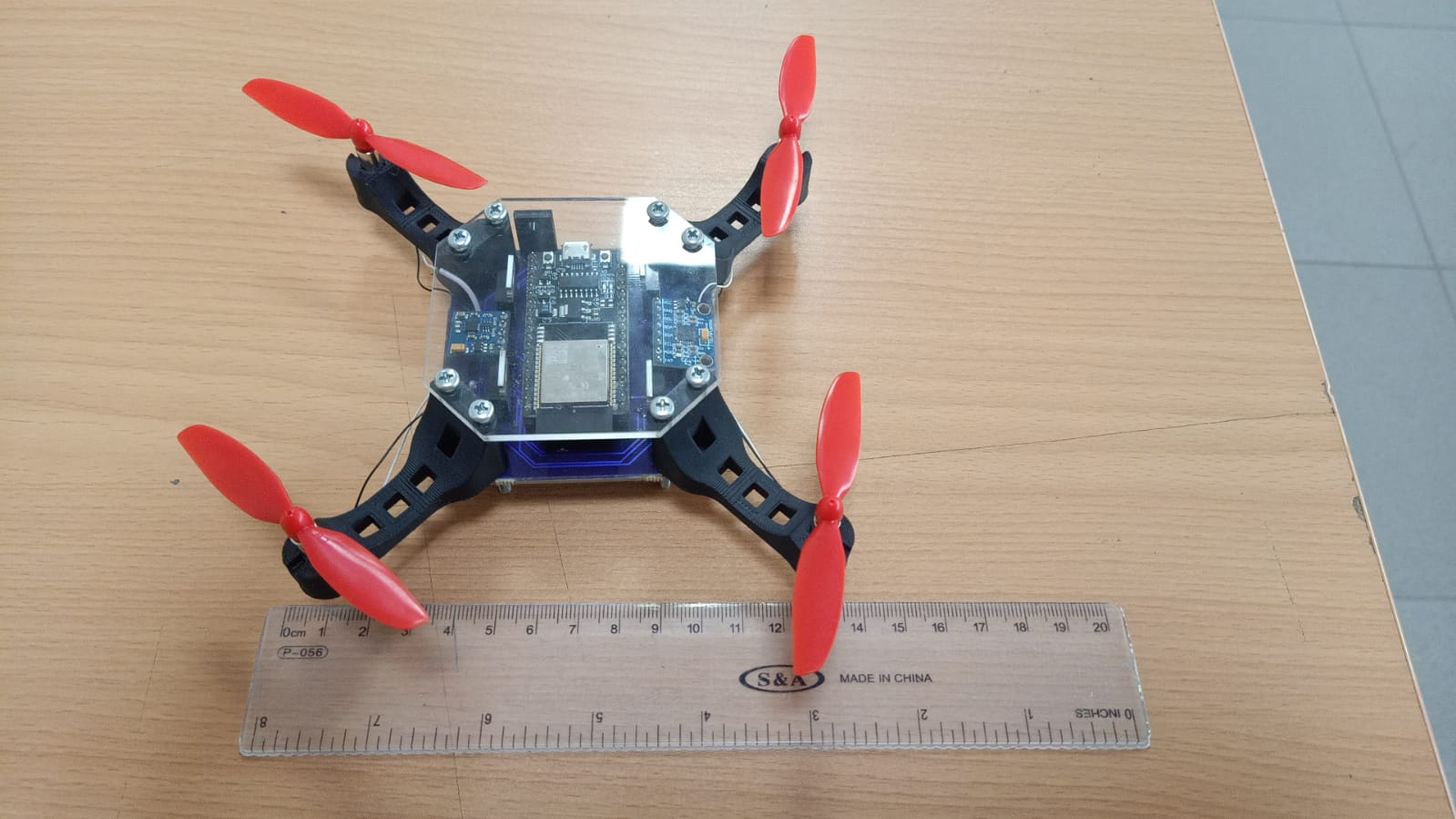
Small Custom-built Drone
This is one of our custom-built drones. Designed and manufactured by our team to fit in the palm of your hand.
Autonomous Flight
A video demonstrating autonomous flight of one of our drones in sync with its simulation.
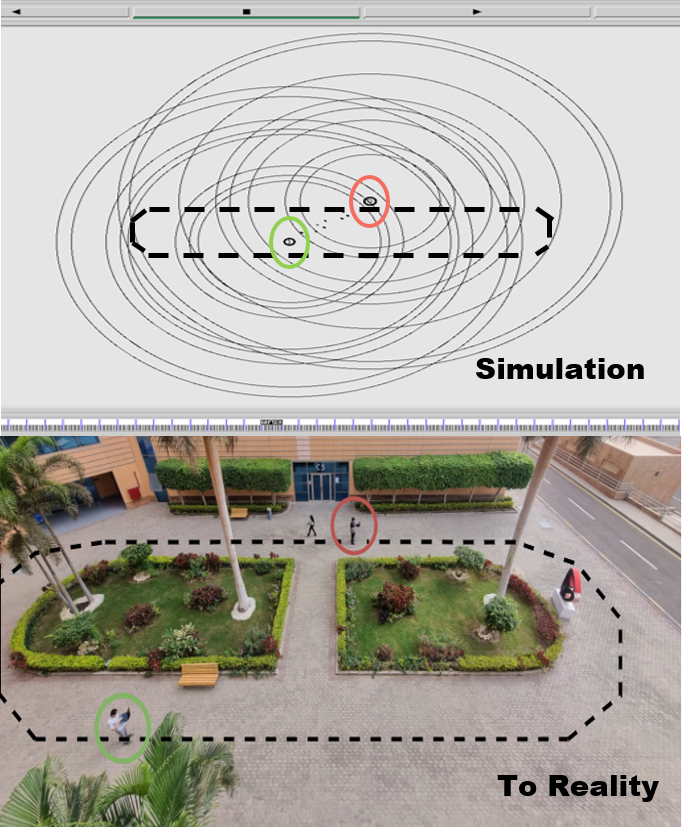
Multi Agent System
Testing out accuracy of IEEE802.11n NS-2 simulations against real-life data-driven network communication model that assists in Formation control of Networked Multi-agent systems.

Cyber Physical Systems Laboratory
Explore our Cyber Physical Systems (CPS) Laboratory, which is equipped with various setups that mimic real-world applications designed for control experiments.
Twin Rotor Aerodynamic System
A video demonstrating control of the Twin Rotor System
Magnetic Levitation System
A video demonstrating control of the Magnetic Levitation System
Inverted Pendulum
A video demonstrating control of the Inverted Pendulum
Tower Crane
A video demonstrating the effect of controlling the Tower Crane System with the presence of disturbances given by Stewart platform